
Synchronized Position-Force Control for Multiple-Ram Axes
January 24, 2014 — Battle Ground, WA — Delta Computer Systems, Inc. announces an enhanced motion control synchronizing feature for press applications. Multi-ram presses have historically employed very heavy guides and platens to prevent the platen from skewing. The electronic position-force synchronization offered by the RMC150 now allows for lighter machines to accurately control total force while keeping the ram positions identical to within a few thousandths of an inch. Figures 1 & 2 demonstrate the minimal skew obtained in a very uneven load situation.
If an application requires 2 axes, the RMC75 controller will deliver this capability. For larger applications, the RMC151E controller can handle up to 6 axes if the force is obtained via pressure sensors (2 per ram), or up to 8 axes of position-force control if load cells are a viable option.
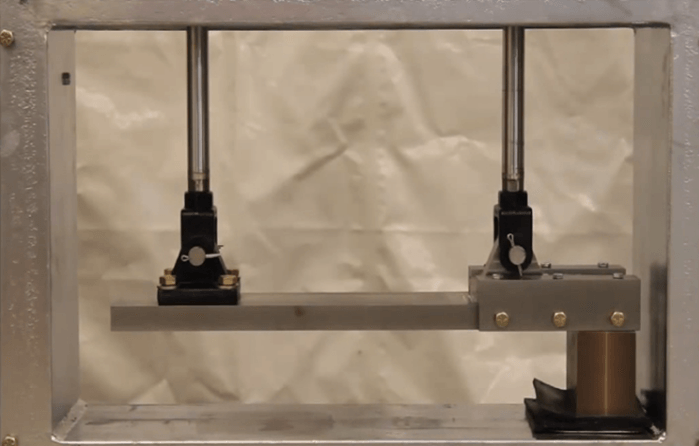
Figure 1
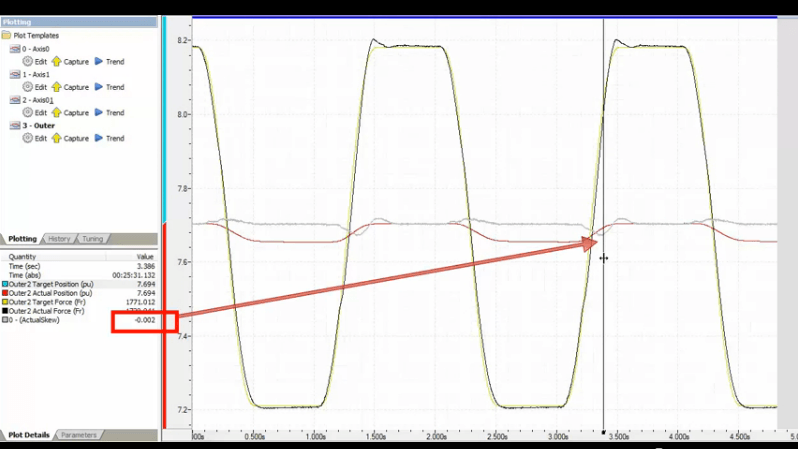
Figure 2
Delta's RMCs for Synchronized Position-Force. Figure 1 shows non centered load and Figure 2 shows a plot of minimized skew between cylinders.
"Delta customers want precision and repeatability when executing position and/or pressure/force control in all multi-axis applications," stated Steve Nylund, Delta’s CEO. "This feature can help deliver high performance in multi-ram applications even with very uneven loads." Nylund added.
The high performance motion control products that Delta designs, manufactures and markets are used worldwide for hydraulic, pneumatic and electric closed-loop control in a wide array of single and multi-axis applications, including testing, food, energy, automotive, entertainment, plastics, materials, aerospace, metals, forest products and others.
###
About Delta: For over 40 years, Delta has supplied motion controllers and other industrial products that enable better performing machines. Delta's RMC Motion Controllers are used for hydraulic, pneumatic, and electric closed-loop control in a wide array of single and multi-axis control and testing applications. For more information contact Delta Computer Systems, Inc., at (360) 254-8688, email technicalsales@deltamotion.com, or visit www.deltamotion.com.